Direct Visual Odometry for a Fisheye-Stereo Camera
2017
Conference Paper
avg
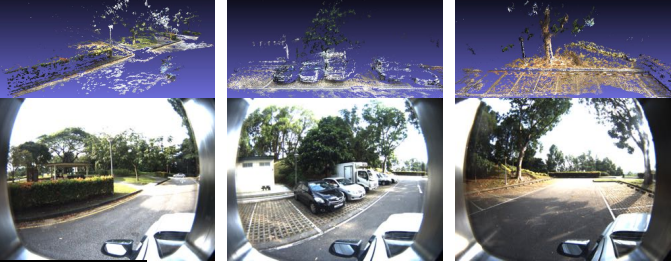
We present a direct visual odometry algorithm for a fisheye-stereo camera. Our algorithm performs simultaneous camera motion estimation and semi-dense reconstruction. The pipeline consists of two threads: a tracking thread and a mapping thread. In the tracking thread, we estimate the camera pose via semi-dense direct image alignment. To have a wider field of view (FoV) which is important for robotic perception, we use fisheye images directly without converting them to conventional pinhole images which come with a limited FoV. To address the epipolar curve problem, plane-sweeping stereo is used for stereo matching and depth initialization. Multiple depth hypotheses are tracked for selected pixels to better capture the uncertainty characteristics of stereo matching. Temporal motion stereo is then used to refine the depth and remove false positive depth hypotheses. Our implementation runs at an average of 20 Hz on a low-end PC. We run experiments in outdoor environments to validate our algorithm, and discuss the experimental results. We experimentally show that we are able to estimate 6D poses with low drift, and at the same time, do semi-dense 3D reconstruction with high accuracy.
| Author(s): | Peidong Liu and Lionel Heng and Torsten Sattler and Andreas Geiger and Marc Pollefeys |
| Book Title: | Proceedings IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) |
| Year: | 2017 |
| Month: | September |
| Day: | 24-28 |
| Publisher: | IEEE |
| Department(s): | Autonomous Vision |
| Research Project(s): |
Global Localization and Affordance Learning
|
| Bibtex Type: | Conference Paper (inproceedings) |
| Paper Type: | Conference |
| Event Name: | IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) |
| Event Place: | Vancouver, BC, Canada |
| Address: | Piscataway, NJ, USA |
| ISBN: | 978-1-5386-2682-5 |
| ISSN: | 2153-0866 |
| Links: |
pdf
|
|
BibTex @inproceedings{Liu2017IROS,
title = {Direct Visual Odometry for a Fisheye-Stereo Camera},
author = {Liu, Peidong and Heng, Lionel and Sattler, Torsten and Geiger, Andreas and Pollefeys, Marc},
booktitle = {Proceedings IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
publisher = {IEEE},
address = {Piscataway, NJ, USA},
month = sep,
year = {2017},
doi = {},
month_numeric = {9}
}
|
|