Code and Data

Slow Flow: Exploiting High-Speed Cameras for Accurate and Diverse Optical Flow Reference Data
2017-06-01
Existing optical flow datasets are limited in size and variability due to the difficulty of capturing dense ground truth. In this paper, we tackle this problem by tracking pixels through densely sampled space-time volumes recorded with a high-speed video camera. Our model exploits the linearity of small motions and reasons about occlusions from multiple frames. Using our technique, we are able to establish accurate reference flow fields outside the laboratory in natural environments. Besides, we show how our predictions can be used to augment the input images with realistic motion blur. We demonstrate the quality of the produced flow fields on synthetic and real-world datasets. Finally, we collect a novel challenging optical flow dataset by applying our technique on data from a high-speed camera and analyze the performance of the state-of-the-art in optical flow under various levels of motion blur. Includes high-frame-rate version of the Sintel dataset.
http://www.cvlibs.net/projects/slow_flow/
https://github.com/autonomousvision/slow_flow

KITTI 2015: Stereo, Flow, and Scene Flow Benchmark
2015-06-01
KITTI is one of the most popular datasets for evaluation of vision algorithms, particuarly in the context of street scenes and autonomous driving. The stereo 2015 / flow 2015 / scene flow 2015 benchmark consists of 200 training scenes and 200 test scenes (4 color images per scene, saved in loss less png format). Compared to the stereo 2012 and flow 2012 benchmarks, it comprises dynamic scenes for which the ground truth has been established in a semi-automatic process.
http://www.cvlibs.net/datasets/kitti/eval_scene_flow.php?benchmark=flow
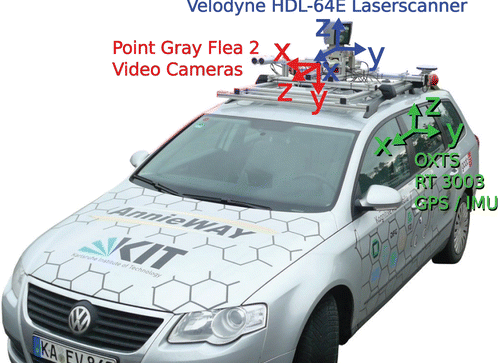
The KITTI Dataset
2013-06-01
The KITTI dataset is the de-facto standard for developing and testing computer vision algorithms for real-world autonomous driving scenarios and more.
http://www.cvlibs.net/datasets/kitti/

OctNet: Learning Deep 3D Representations at High Resolutions
We present OctNet, a representation for deep learning with sparse 3D data. In contrast to existing models, our representation enables 3D convolutional networks which are both deep and high resolution. Towards this goal, we exploit the sparsity in the input data to hierarchically partition the space using a set of unbalanced octrees where each leaf node stores a pooled feature representation. This allows to focus memory allocation and computation to the relevant dense regions and enables deeper networks without compromising resolution. We demonstrate the utility of our OctNet representation by analyzing the impact of resolution on several 3D tasks including 3D object classification, orientation estimation and point cloud labeling.