Group News
Better decisions, more control: “Best Paper Award” for Tübingen researchers
- 26 June 2021
Two Cyber Valley researchers awarded for best scientific paper at world-renowned conference
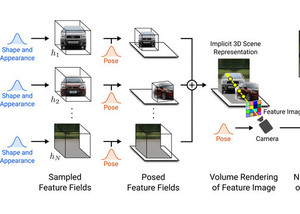
Great success for two AI researchers from the Cyber Valley ecosystem: Michael Niemeyer, PhD student at the Max Planck Institute for Intelligent Systems, and Prof. Dr. Andreas Geiger from the University of Tübingen were honored with the ‘Best Paper Award’ at this year’s Conference on Computer Vision and Pattern Recognition (CVPR) for their paper ‘GIRAFFE: Representing Scenes as Compositional Generative Neural Feature Fields’.
Teaching machines to see like people
- 10 December 2020
Researchers in Tübingen develop new approach to 3D-aware image synthesis
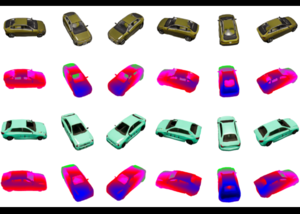
With Generative Radiance Fields for 3D-Aware Image Synthesis (GRAF), scientists from the University of Tübingen and Max Planck Institute for Intelligent Systems have vastly improved the quality of machine-generated 3D images of single objects.
KITTI-360 Dataset
- 07 October 2020
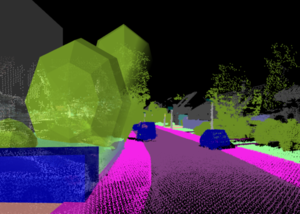
We have released the KITTI-360 dataset, a large-scale dataset with rich sensors, accurate localisations and comprehensive annotations! It aims to foster research in new important research areas relevant to the computer graphics, computer vision and robotics community.

ELLIS PhD Program: Call for Applications
- 10 September 2020
The European Laboratory for Learning and Intelligent Systems offers an interdisciplinary PhD program. The ELLIS PhD program is a key element of the ELLIS initiative and its goal is to foster and educate the best talent in machine learning related research areas by pairing outstanding students with leading academic and industrial researchers in Europe. The program supports excellent PhDs across Europe by giving them access to leading research through boot camps, summer schools and workshops of the ELLIS programs. Every PhD student is supervised by one ELLIS fellow/scholar and one ELLIS member from a different country and conducts a 1 year exchange at the other location.
MPI for Intelligent Systems continues video series
- 29 April 2020
Video No 4 is now available
Short films present scientists' research projects in an understandable way
Alejandro Posada Linda Behringer Georg Martius Alexander Badri-Sprowitz Andreas Geiger Sebastian Trimpe

Andreas Geiger selected as Top 40 under 40
- 21 November 2019
Andreas Geiger has been selected as top 40 under 40 by the capital magazine.

Color patch could throw self-driving vehicles off track
- 25 October 2019
Researchers send wake-up call to the car industry
A team of researchers in Tübingen show that optical flow systems based on deep neural networks – a likely component of future autonomous cars – are vulnerable to adversarial attacks. The computer vision experts are shaking up the automotive industry by warning car manufacturers around the globe that it could take a simple color pattern to put the brakes on computer vision systems in autonomous cars.
Anurag Ranjan Joel Janai Andreas Geiger Michael Black Linda Behringer

Andreas Geiger receives a Starting Grant of the European Research Council (ERC)
- 23 September 2019
The funding will be used to advance the field of autonomous vision
The MPI-IS group leader and professor at the University of Tübingen will receive a grant of some 1.47 million euros for his "LEGO 3D" project.

3rd Computational Vision Summer School - Apply now!
- 12 March 2019
From 30.6. to 7.7.2019 Application deadline: April 15, 2019
We are organizing the 3rd Computational Vision Summer School from 30.6. to 7.7.2019 in the beautiful black forest, Germany. It is aimed at PhD students and Postdocs with an interest in vision science research. Previous editions were fun, intellectually rewarding events for students and faculty alike. The summer school spans the entire spectrum of vision research from neuroscience and psychophysics to computer vision and fosters discussions at the intersection of biological and artificial vision systems. The school is unique in bringing together people from diverse disciplines in a very familiar atmosphere (only 60 people in total). CVSS is tuition free and accomodation is sponsored by the CRC/1233 Robust Vision.