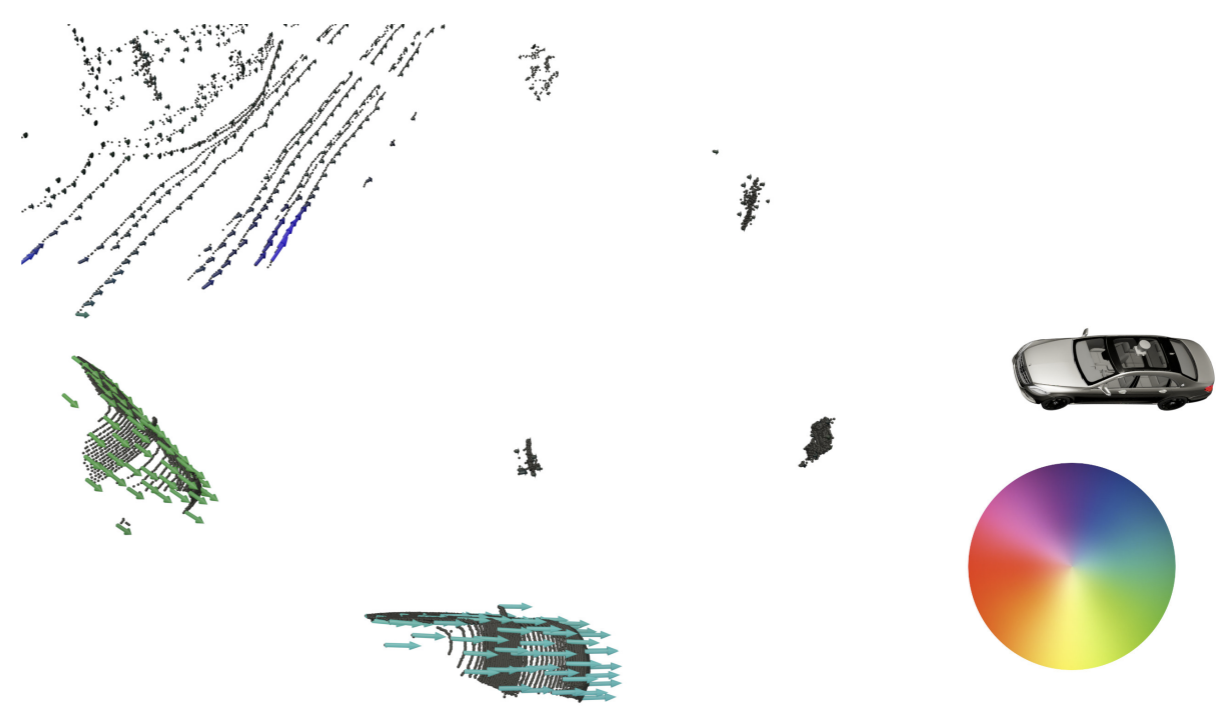
SLIM: Self-Supervised LiDAR Scene Flow and Motion Segmentation
2021
Conference Paper
avg
Recently, several frameworks for self-supervised learning of 3D scene flow on point clouds have emerged. Scene flow inherently separates every scene into multiple moving agents and a large class of points following a single rigid sensor motion. However, existing methods do not leverage this property of the data in their self-supervised training routines which could improve and stabilize flow predictions. Based on the discrepancy between a robust rigid ego-motion estimate and a raw flow prediction, we generate a self-supervised motion segmentation signal. The predicted motion segmentation, in turn, is used by our algorithm to attend to stationary points for aggregation of motion information in static parts of the scene. We learn our model end-to-end by backpropagating gradients through Kabsch's algorithm and demonstrate that this leads to accurate ego-motion which in turn improves the scene flow estimate. Using our method, we show state-of-the-art results across multiple scene flow metrics for different real-world datasets, showcasing the robustness and generalizability of this approach. We further analyze the performance gain when performing joint motion segmentation and scene flow in an ablation study. We also present a novel network architecture for 3D LiDAR scene flow which is capable of handling an order of magnitude more points during training than previously possible.
| Author(s): | Stefan Baur and David Emmerichs and Frank Moosmann and Peter Pinggera and Bjorn Ommer and Andreas Geiger |
| Year: | 2021 |
| Department(s): | Autonomous Vision |
| Bibtex Type: | Conference Paper (inproceedings) |
| Links: |
Paper
Supplementary Material Video |
| Video: | |
|
BibTex @inproceedings{Baur2021ICCV,
title = {SLIM: Self-Supervised LiDAR Scene Flow and Motion Segmentation},
author = {Baur, Stefan and Emmerichs, David and Moosmann, Frank and Pinggera, Peter and Ommer, Bjorn and Geiger, Andreas},
year = {2021},
doi = {}
}
|
|