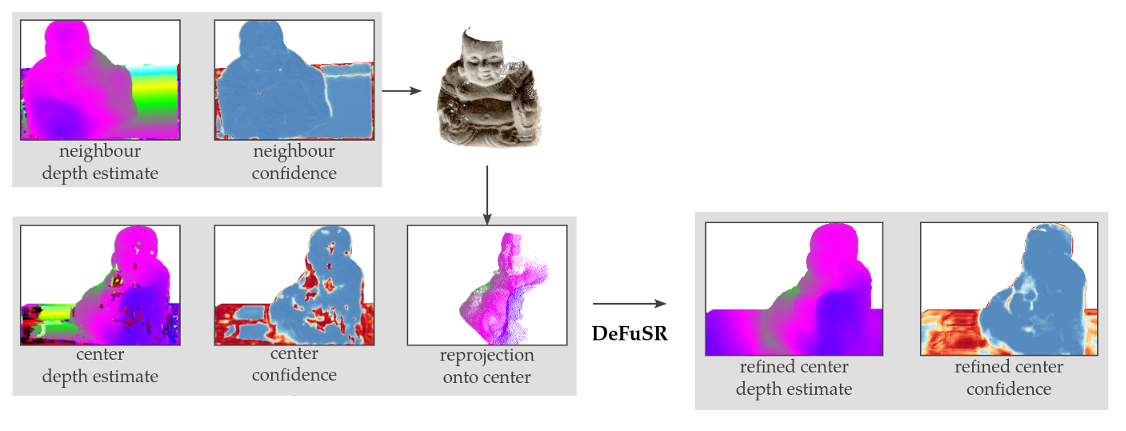
The center view depth estimate is inaccurate around the center of the Buddha, even though the neighbouring view has a confident estimate for these areas. By reprojecting the neighbour’s information onto the center image, we efficiently encode this information for the refinement network to resolve the uncertain areas. Iteratively performing this refinement further improves the estimates.
Given a set of input views, multi-view stereopsis techniques estimate depth maps to represent the 3D reconstruction of the scene; these are fused into a single, consistent, reconstruction -- most often a point cloud. In this work we propose to learn an auto-regressive depth refinement directly from data. While deep learning has improved the accuracy and speed of depth estimation significantly, learned MVS techniques remain limited to the planesweeping paradigm. We refine a set of input depth maps by successively reprojecting information from neighbouring views to leverage multi-view constraints. Compared to learning-based volumetric fusion techniques, an image-based representation allows significantly more detailed reconstructions; compared to traditional point-based techniques, our method learns noise suppression and surface completion in a data-driven fashion. Due to the limited availability of high-quality reconstruction datasets with ground truth, we introduce two novel synthetic datasets to (pre-)train our network. Our approach is able to improve both the output depth maps and the reconstructed point cloud, for both learned and traditional depth estimation front-ends, on both synthetic and real data.
Github for source code: https://github.com/simon-donne/defusr
Paper: http://www.cvlibs.net/publications/Donne2019CVPR.pdf
Poster: http://www.cvlibs.net/publications/Donne2019CVPR_poster.pdf
Supplementary: http://www.cvlibs.net/publications/Donne2019CVPR_supplementary.pdf
Data/datasets:
Generated FlyingThingsMVS, quarterHD: flying_things_MVS_0.25.tar.gz
Backgrounds for this dataset (required by the generation script): flying_backgrounds.tar.gz
Generated UnrealDTU dataset, drop-in for DTU: unrealDTU.tar.gz
Generated ground truth depth maps and auxiliary files for DTU: DTU_extension.tar.gz
Manual capture for the test on real data in the paper: manual_capture_set.tar.gz
Pretrained models for testing: models.zip